

Locating Miss Aida
Photos by Evan Krape and courtesy of Grant Otto March 03, 2021
UD helps in search for sunken tugboat in the Delaware Bay
In many ways, University of Delaware master’s student Grant Otto had been training to respond to a call like the one he got on the morning of Tuesday, December 15, 2020 from the moment he started working with Art Trembanis in the University’s Robotics Discovery Laboratories in 2018.
On that cold, December morning, Trembanis was on a boat in the Delaware Inland Bays working with members of the Robotics Discovery Labs using side scan sonar to locate lost or abandoned crab pots. While on the water, he got a call from Mark Moline, director of the School of Marine Science and Policy (SMSP) in UD’s College of Earth, Ocean and Environment, who informed him that the Delaware Coast Guard reported a tugboat, Miss Aida, had sunk overnight about two nautical miles north of Cape Henlopen State Park in the mouth of the Delaware Bay.
Locating the sunken tugboat quickly was critical because it sank in an area of the Bay that experiences high traffic, with big vessels and ferry boats coming into the bay. In addition, because the boat went down suddenly, it had fuel, oil and electronics on board that could adversely affect the surrounding environment.
Otto, who joined Trembanis’ lab in 2018 as a lab engineer and is now a master’s student in SMSP, was back on shore working on a research proposal when Trembanis called and asked if he would be willing to help find the sunken tugboat. Otto jumped at the opportunity.
“One of the reasons I became a master’s student and I work in science is because I enjoy helping people — whether that is through serving the community or serving science,” said Otto. “Whenever there is a direct opportunity to make a difference during a particular day and you are able to see the effects of it, I was excited to do that.”
Having over two years of experience working with Trembanis and the tools used to locate sunken vessels, such as side scan sonar, allowed Otto to put all of the experience and knowledge to the ultimate test.
“It definitely was a nice test for me and at the end of the day, it became a verification of the skills that I had,” said Otto.

Trembanis, professor in SMSP, said that while he has simulated scenarios in class for his robotics students where they plan missions to search for sunken shipwrecks, this was a 100%, real-world scenario.
“Grant got to put into practice everything from the preparation of equipment, how to strategize and best plan the search effort, how to quickly assess the information, and he got a whirlwind, world-class education in that kind of response,” said Trembanis. “I knew Grant was the right person to call for our team and he readily drew on experiences and the lessons that, like so many of our students, he has acquired in being familiar and comfortable in working on ships in the water with a sudden, diverse team that is brought together with one goal in mind.”
Chain of events
In addition to having someone with Otto’s experience able to jump in and help locate the sunken tugboat at a moment’s notice, Trembanis also said that having professionals from Ocean Infinity (OI), a leading marine robotics company, and the equipment that OI houses at the Hugh R. Sharp Campus in Lewes was critical in forming a quick response.
“In just a few minutes of talking with Mark Moline, we quickly realized that we had some assets available to help and we also had the serendipitous fact that we have Ocean Infinity here with us with four Autonomous Surface Vessels (ASVs), including two of which were in the water with exactly the kinds of equipment that we would want to use to go after [the tugboat],” said Trembanis.
OI has a memorandum of understanding with UD that was signed in 2018 and the four ASVs were recently brought to UD. In addition, OI has recently added two of their large HUGIN Autonomous Underwater Vehicles that are stationed in Lewes.
With the help of Andy Sherrell, who is the operations manager for the OI team in Lewes, the UD and OI personnel quickly connected to form a response.
Otto, who would serve as the principal investigator on the project from the UD side, worked with Jon Swallow, director of UD Marine Operations, and Evan Falgowski, skipper of the UD Research Vessel Joanne Daiber. They soon had a side scan sonar — on loan from Doug Levin, chief innovation officer at the Center for Environment and Society at Washington College — being towed behind the back of the R/V Daiber, ready to head to the approximate site where the tugboat sank.
At the same time, T.J. Maise from OI was able to get two of the Seaworker ASVs, which are equipped with multibeam echosounder for seafloor mapping, ready to go and search for the sunken vessel.
Trembanis said that he was impressed with both the UD and OI response time.
“We went from zero to ‘Go find it’ in about a five- to a six-hour window,” said Trembanis. “They compressed what should have been probably a six-hour mobilization into about two hours and then they were on their way out to the site.”
UD and OI weren’t the only ones on the site as they were joined in the search by the Coast Guard, the Lewes Fire Department and the Delaware Department of Natural Resources and Environmental Control – Natural Resources Police.
Approaching storm
In addition to the tight turnaround to look for the ship, there was also a nor’easter bearing down on the site where the ship sank, threatening to hide the ship even more if it wasn’t located quickly.
“It was a rough day out,” said Otto. “The waves were about four-feet and hitting at every five seconds so it was battering the boat quite a bit.”
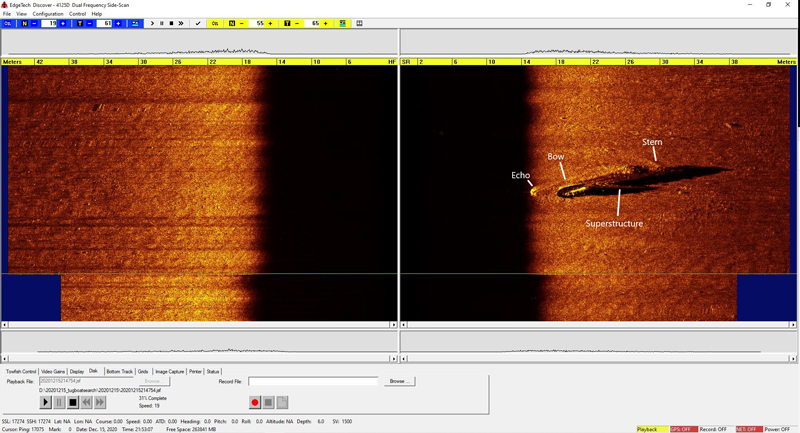
The rough weather also caused what are known as motion artifacts — motion blurs that obscure images in the sonar data — which made it tough for Otto to tell whether the lines they were seeing were from boat leakage or water movement.
Utilizing the ASVs and the side scan sonar, the UD/OI team started searching in a latitude and longitude box that was established by the Coast Guard. The Lewes Fire Department started at the top of the box and the UD/OI team started searching at the bottom of the box.
Eventually, the Lewes Fire Department found something with their sonar and the UD/OI team went over to help verify what they found and make more assessments as to the overall state of the sunken ship — verifying that Miss Aida was sitting upright about 80 feet down.
Once the ship was located, Miss Aida was eventually recovered from the seabed a few weeks later.
Otto said that he was proud of how all the different organizations came together to help locate the sunken ship.
“I’m very appreciative of the way that the Coast Guard, the University and the fire department all came together without previously being involved in any kind of organized drill for this,” said Otto. “We came together and made a really good effort and successfully found the shipwreck less than 24 hours after it had gone down. It’s a great feat, and it was a big team effort.”
Contact Us
Have a UDaily story idea?
Contact us at ocm@udel.edu
Members of the press
Contact us at mediarelations@udel.edu or visit the Media Relations website