





Running robots
Professor investigates control strategies in four-legged running robots



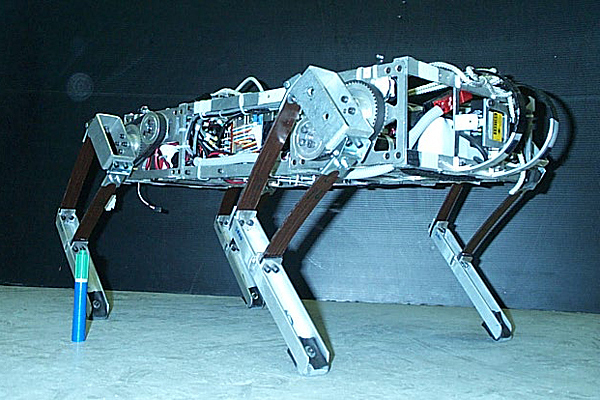
8:39 a.m., Jan. 24, 2012--A cheetah running in its natural environment is an elegant, fluid display of biomechanics. What if robots could run the same way, and be deployed for search and rescue operations in areas where conventional vehicles cannot go?
According to University of Delaware assistant professor Ioannis Poulakakis, a large fraction of the Earth’s surface remains inaccessible to conventional wheeled or tracked vehicles, while animals and humans traverse such terrain with ease and elegance. He believes that legs have the potential to extend the mobility of robots, enabling them to become useful in real-world situations, such as search and rescue.
Research Stories

Chronic wounds
Prof. Heck's legacy
Poulakakis is the principal investigator of a three-year, $265,532 grant from the National Science Foundation (NSF) to develop a family of systematic control strategies that work together with the robot’s natural dynamics to generate fast, reliable and efficient running motions.
The project, funded under NSF’s Division of Civil, Mechanical and Manufacturing Innovation (CMMI), will focus on the running motion of quadrupeds (four-legged robots) with elastic energy storage elements such as springs.
“Biomechanics research demonstrates that springs and running are intimately related. When you run,” Poulakakis explains, “the knee of the leg that is on the ground initially bends and then extends to prepare the body for take-off. During knee bending, energy is stored in elastic elements such as tendons or muscle fibers. Then, this energy is released during knee extension, pushing the body upward and forward.”
In other words, when animals run, they "tune" their musculoskeletal system so that their center of mass appears to be moving as if following the motion of a pogo-stick.
Using this hypothesis as inspiration, Poulakakis suggests the same theory can be applied to robots because the pogo-stick is an example of a simple mechanical system that can be studied using the basic laws of physics. In particular, the proposed research involves developing similar systematic "energy-saving" controls that can replicate this natural, intuitive running phenomenon in robots through feedback design, rather than through hardware redundancy.
If successful, the work would enable quadrupeds to move reliably at high speeds, self-correct to prevent falls and mimic their animal counterpart’s running motion.
Under the grant, Poulakakis will develop:
- models of locomotion behavior;
- analytical methods to rigorously characterize cyclic motion generation and stability of quadrupedal running gaits;
- constructive control techniques and systematic control law design tools that minimize laborious, trial-and-error experimentation;
- verification procedures to test the controllers in a variety of running gaits; and
- student education and engineering research experiences for K-12 teachers designed to inspire the next generation of engineers.
Robotic quadrupeds offer unique advantages due to their enhanced stability, high-load carrying capacity and low mechanical complexity. Their ability to travel to areas deemed unsafe for humans, Poulakakis believes, may also enable legged robots to provide critical assistance in search and rescue operations, and may have potential applications in industrial, agricultural and military industries.
The fundamental results of this work, however, are expected to apply to dynamically-stable legged robots with different leg numbers and postures.
“If successful, this research effort will impact the study of many other engineered and biological systems which, like legged robots, accomplish their purpose through forceful, cyclic interactions with the environment.”
About the researcher
Ioannis Poulakakis joined UD in 2010 as an assistant professor in the Department of Mechanical Engineering. His expertise lies in formal control synthesis for hopping robot models and on intuitive control design for quarupedal running machines. He previously served as a postdoctoral associate in the Department of Mechanical and Aerospace Engineering at Princeton University.
Poulakakis earned his doctoral degree in electrical engineering systems and his master of science degree in applied mathematics from the University of Michigan, Ann Arbor. He also holds a master of engineering degree from McGill University in Montreal and a master of science in robotics and automation from the National Technical University of Athens, Greece, where he also earned his diploma in mechanical engineering.
He is the author of 23 journal publications, book chapters and refereed conference papers.
Article by Karen B. Roberts