





NSF Career Award
Poulakakis receives NSF award to develop planning strategies for animal-inspired robots



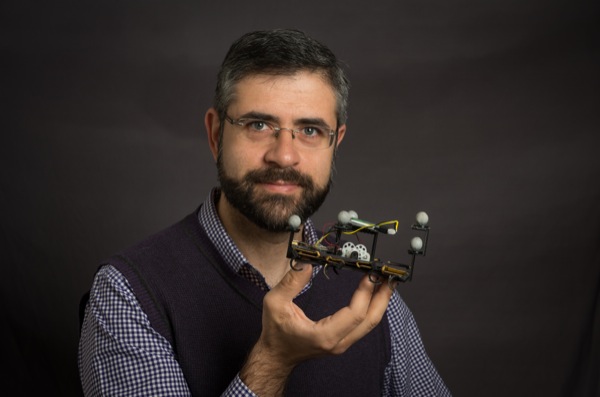
2:03 p.m., April 24, 2014--Ioannis Poulakakis, assistant professor of mechanical engineering at the University of Delaware, has received a prestigious Faculty Early Career Development Award from the National Science Foundation to support his robotics research.
Poulakakis is investigating ways to regulate the cyclic motion of legged robots so that they can perform tasks such as surveillance or exploration, jobs previously reserved for wheeled systems.
Honors Stories

National Medal of Science
Warren Award
“Planning a robot’s movements to achieve real-life tasks — such as exploration or search and rescue missions — is a key problem in robotics. When it comes to legged robots, we know what controls can generate reliable locomotion, but how these controls are linked with higher level mission objectives is not well-explored,” Poulakakis said.
When searching for inspiration, Poulakakis looked to nature.
“Animals move purposefully. Foraging for food, pursuing a prey, fleeing an environment, these are all examples of high-level animal behaviors planned to achieve a goal,” he said.
He is particularly interested in the way an animal’s limbs move during locomotion — a choreographed, cyclic motion that combines complex muscular planning, momentum and agility.
“Steering a legged robot’s dynamic, or constantly changing, movements is challenging because its fundamental task is to remain upright and in motion,” he explained. This basic constraint can limit things like traveling speed, mobility and maneuverability, which can interfere with the robot’s ability to accomplish tasks where reasoning is required.
“We need to provide the necessary robotics science and technology to create dexterous, highly-mobile legged robots that can autonomously plan actions in human-centric environments,” Poulakakis said.
Algorithms help robots sense, plan and act. Many established algorithms separately address high-level (mission planning) and low-level (locomotion stability) objectives; but, when it comes to dynamically moving legged robots, none integrate the two.
Poulakakis is working to develop real-time planning algorithms that can bridge the gap between a robot’s platform controls and higher-level motion planning objectives. If successful, this research will bring highly mobile and versatile robot platforms like legged machines closer to real-life applications in industry, agriculture and emergency response. For example, in supply chain management systems legged robots could help companies rapidly reconfigure their production or assembly lines to adapt to changes in demand or new product designs.
He will work with robots of different types and sizes, ranging from slow moving palm-sized crawlers weighing mere ounces to rapid runners including bipeds and quadrupeds weighing hundreds of pounds.
Similar to their counterparts in nature, small and large legged robots operate differently, enabling the researchers to study the effect of scale on their approach. In particular, they will concentrate on a 150 pound quadruped’s capacity to walk, trot and bound in an uncertain environment and a 1.3 ounce octoroach’s ability to navigate in tightly constrained spaces while crawling and running.
About the professor
Ioannis Poulakakis joined University of Delaware in 2010 as an assistant professor in the Department of Mechanical Engineering. His research explores dynamics and control issues in bio-inspired robotic systems, specifically legged robots. He also investigates the dynamics of collective decision making in multi-agent systems.
Poulakakis earned his doctoral degree from University of Michigan, Ann Arbor, in 2008 within the area of systems and control. Prior to joining UD, he was a postdoctoral research associate at Princeton University.
Article by Karen B. Roberts
Photos by Kathy F. Atkinson and Evan Krape