





Robots, astronauts and asteroids
Underwater robot helps NASA prepare for asteroid exploration



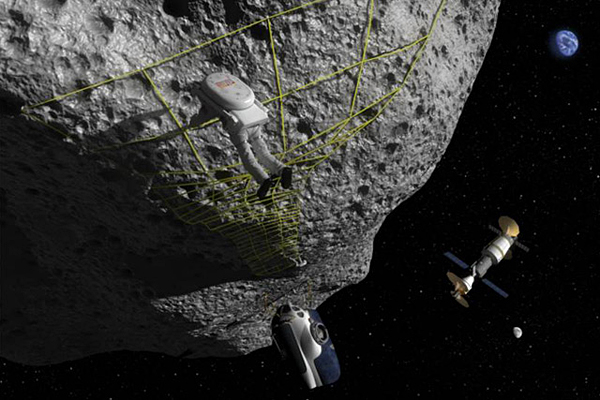
2:03 p.m., May 23, 2011--NASA has its sights set on asteroid exploration, which is just as tricky as it sounds. An asteroid has little gravitational force, which rules out walking on one. Anchoring to the surface is a solution, but because an asteroid comprises so many different materials even that is a challenge.
So how is the space agency planning for such a task? Earlier this month it sent teams underwater to prepare for a simulated mission to a near-Earth asteroid in October. The effort, coordinated by NASA’s Extreme Environment Mission Operations project, took place 3.5 miles off Key Largo, Fla., at the Aquarius Underwater Laboratory.
Research Stories

Chronic wounds
Prof. Heck's legacy
“An underwater habitat provides an environment where you have to consider life support, communication, food and supplies and near weightlessness, which is what the astronauts are going to encounter on this kind of object,” said Art Trembanis, University of Delaware assistant professor of geological sciences.
Trembanis, Doug Miller, associate professor of oceanography, and collaborator Alex Forrest of the University of California–Davis were on hand during the project’s first planning phase May 1–5, though they weren’t in the underwater habitat like the astronauts will be for their simulated mission. They worked from a surface vessel to deploy UD’s autonomous underwater vehicle (AUV), which uses cameras, sonar sensors and other instruments to gather all types of vital underwater information.
Their goal was to provide baseline mapping of the area and to determine what the terrain looks like, what is it made of, the available resources and the environmental conditions. All that information will help NASA experts planning the simulation mission make decisions such as what kind of wetsuits are needed or where to place an obstacle the astronauts will use to practice their asteroid-walking skills.
“Our role was to gather as much information as we could,” Trembanis said, “and to maximize the potential for exploration.”
They certainly accomplished that. Over four days the robot covered 62 miles and collected water quality parameters such as salinity, temperature and dissolved oxygen, and more than 12 hours of high-definition video and 85,000 images. Because the AUV is much more agile than the tethered robots previously used to scout the area around Aquarius, it was able to gather more information than ever before.
“Surface ships had a tough time because there’s a whole series of cables,” Trembanis explained. “The AUV allowed us to get in there.”
The team collected the information with funding from NASA, but the data will have valuable ocean science uses as well. For instance, Trembanis said he plans to compare them with similar data collected for a Sea Grant-funded project that studies habitats around reef systems in Delaware Bay.
The endeavor also afforded some pretty unique opportunities for UD students. Graduate students Jonathan Gutsche and Bryan Keller helped deploy the AUV on its missions in Florida, and graduating geology major Lyle De La Rosa took part in the trip for his Discovery Learning Experience project. He helped process data and determine targets for exploration during the trip.
“It definitely was a really cool experience,” he said. “I’m gaining some amazing tools and knowledge that not a lot of people have in my major.”
Students back at UD also got in on the action. The researchers held two live class sessions with students watching on the large screens of the Department of Geological Sciences’ VAST Lab. It was an interactive, front-row seat.
“We were sending back snippets of our HD video and our data,” Trembanis said. “It was rewarding to be able to bring them that minutes-old data.”
Even better, Trembanis was able to sign off from class one of the days by doing a back roll off the boat into a dive.
“Any day you an end class with a dive is a good day,” he said with a smile.
Article by Elizabeth Boyle